Mahdi Naddaf
Research Scientist
University of California - Davis
Biography
I am Mahdi Naddaf. Currently I am working as a research scientist at UC Davis. I was a research scientist at Ford Motor Company, Greenfield Labs, located in Palo Alto, California, United States. I was previously a postdoc at Galban Lab, University of Michigan. I completed my Doctoral of Engineering in Electrical Engineering with a focus on Computer Vision (Deep Learning) and Robotics at Lamar University in 2020 under the supervision of Dr. Hassan Zargarzadeh. I got my M.Sc. in Artificial Intelligence at the University of Southampton, the U.K, and a B.Sc. in Electrical Engineering- Control. You are most welcome to check out my research and recent publications.
- Artificial Intelligence
- Machine Vision - Deep Learning
- Robotics
Post-Doctoral research fellow, 2021
University of Michigan, US
Doctoral degree in Electrical Engineering, 2020
Lamar University, US
M.Sc. in Artificial Intelligence, 2012
Southampton University, UK
Projects
- Performing pick and place tasks with YuMi cobot with vision-based perception in the loop
- Trained the deep neural network with fully synthetically generated data and labels using Isaac Sim
- Utilizing ROS and customized drivers for controlling the YuMi including the end effectors
- Extended to industrial robot platform ABB IRB-4600
- Using domain randomization to robustify the vision algorithm against edge cases including change of lighting, texture, color and etc.
- Setting up Motion Analysis MOCAP system for RICS Lab.
- Implemented a VRPN for utilizing swarm robots like crazyflie drones
- The Setup is used by other graduate students for swarm robotics experiments
- Developed Deep Learning based defect detector with Bayesian optimization using TensorFlow and Keras
- Created database from scratch and pre-processing images using OpenCV, scikit learn, etc.
- Funded by Stanley Black and Decker
- Co-PI of the proposal
- Developed and optimized deep learning based classification for crack classification
- Implemented a heuristic mapping algorithm for mapping classified cracks
- Implemented on both vehicle and drone platforms
- Funded by Lamar University CICE
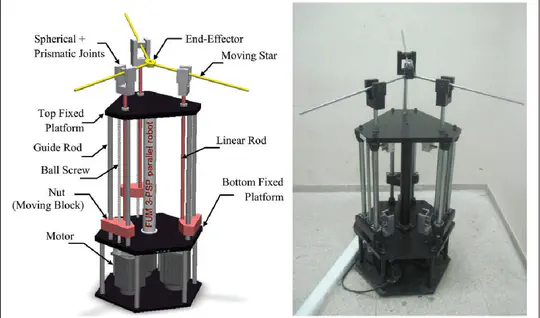
- Designed and implemented a complete electrical interface for 3-PSP Parallel Robot, which is submitted as my B.Sc. final Project
- Designed and implemented a Fuzzy Controller for 3-PSP Parallel Robot
Slected Publications
Gallery






Contact
- mahdinaddaf (at/-@) gmail.com
- Mountain View, CA 94042