Design and implementation of an assistive real-time red lionfish detection system for AUV/ROVs
Abstract
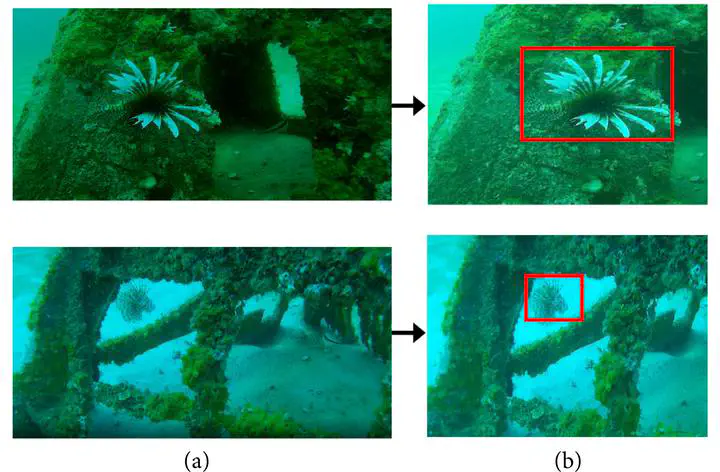
In recent years, the Pterois Volitans, also known as the red lionfish, has become a serious threat by rapidly invading US coastal waters. Being a fierce predator, having no natural predator, being adaptive to different habitats, and being with high reproduction rates, the red lionfish has enervated current endeavors to control their population. This paper focuses on the first steps to reinforce these efforts by employing autonomous vehicles. To that end, an assistive underwater robotic scheme is designed to aid spear-hunting divers to locate and more efficiently hunt the lionfish. A small-sized, open source ROV with an integrated camera is programmed using Deep Learning methods to detect red lionfish in real time. Dives are restricted to a certain depth range, time, and air supply. The ROV program is designed to allow the divers to locate the red lionfish before each dive, so that they can plan their hunt to maximize their catch. Lightweight, portability, user-friendly interface, energy efficiency, and low cost of maintenance are some advantages of the proposed scheme. The developed system’s performance is examined in areas currently invaded by the red lionfish in the Gulf of Mexico. The ROV has shown success in detecting the red lionfish with high confidence in real time.